
Email:
ТЕХНОЛОГИЧЕСКОЕ ОБОРУДОВАНИЕ

ВНИМАНИЮ КЛИЕНТА
СПРАВОЧНАЯ ИНФОРМАЦИЯ
СТАТЬИ И ИНФОРМАЦИЯ
|
Понравилась статья? Сохраните ее ->
|
|
Система управления ЭМО
Система управления ЭМО обеспечивает прохождение критических скоростей вращения и демпфирование колебаний, необходимый запас устойчивости, интегрирование сигнала по перемещению цапфы в зазоре, линейную зависимость восстанавливающей силы от перемещения цапфы.Жесткость, являющаяся одной из важнейших эксплуатационных характеристик ЭМО, также определяется системой управления. В традиционных опорах с подшипниками качения жесткость постоянна. Она обусловлена геометрией подшипников и его материалом и не зависит от частоты возмущающей силы, т. е. динамическая и статическая жесткости равны. В шпинделях, установленных на традиционных опорах качения или скольжения, вибрация возникает в основном из-за несовпадения оси его вращения с осью инерции. Наличие большого зазора между цапфой и статором ЭМО позволяет регулировать положение оси вращения шпинделя и, таким образом, устранять его вибрацию, а также динамические нагрузки на ЭМО, поскольку при регулировании достигается совпадение указанных осей.
Рассмотрим конструкцию ШУ с активными ЭМО (рис. 2.10). В цилиндрическом корпусе 17 находится статор 7 встроенного высокоскоростного электродвигателя, который охлаждается посредством рубашки 6 с циркулирующей водой. В центре вала 1 установлена бочка ротора 19 электродвигателя, с двух сторон которой напрессованы кольцевые пакеты листовой стали, представляющие собой вращающиеся (роторные) части 18 и 20 радиальных магнитных опор и датчиков положения вала. На конце вала расположен диск 11 осевой магнитной опоры и вращающаяся часть датчика 13 осевого положения вала. Неподвижная часть передней радиальной магнитной опоры представляет собой комплект электромагнитов в виде пакетов 4 листовой стали с пазами для обмоток электромагнитов 5.
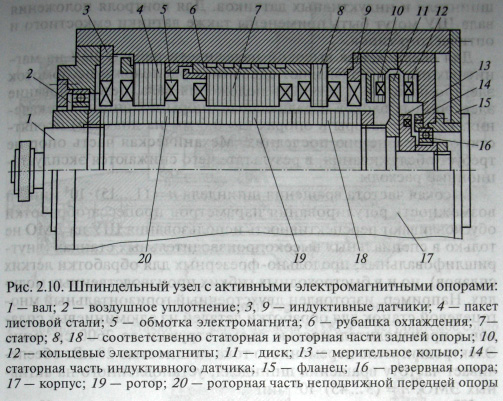
Между статором электромагнита и роторной частью имеется диаметральный зазор, который зависит от диаметра рабочей шейки вала. Рядом с комплектом электромагнитов статорной части передней магнитной опоры установлен индуктивный датчик 3, имеющий большее, чем у опоры, число полюсов и обмоток. Обмотки индуктивного датчика соединены по схеме, обеспечивающей получение наибольшего по величине сигнала при минимальном смещении вала.
Рядом с задней магнитной опорой расположена резервная опора 16, в качестве которой может служить подшипник качения или скольжения. Зазор между валом ШУ и внутренним диаметром резервной опоры меньше, чем между валом ШУ и магнитной опорой, что в аварийных ситуациях обеспечивает сохранность последней. Перед резервным подшипником на передней опоре установлено бесконтактное воздушное уплотнение 2, предохраняющее ШУ от попадания СОЖ.
Размеры и несущая способность задней радиальной опоры могут быть меньше, чем передней. Задняя опора включает ста-торную 8 и роторную 18 части. Вблизи задней опоры расположен индуктивный датчик 9 радиального положения вала. В задней части ШУ имеется осевая двухсторонняя магнитная опора, состоящая из установленного на валу 1 диска 11 с радиальными прорезями и двух кольцевых электромагнитов 10 и 12.
Осевое положение вала контролируется индуктивным датчиком, имеющим статорную часть 14 и закрепленное на вращающемся валу мерительное кольцо 13. В заднем фланце 15 расположены выходные концы электромагнитов статора электрошпинделя и индуктивных датчиков. Для контроля положения вала ШУ могут быть применены также датчики емкостного и оптического типов.
Для обеспечения высокой надежности работы ШУ на магнитных опорах применяют сдвоенное расположение обмоток электромагнитов и датчиков положения вала, резервирование электронных блоков и радиальные опоры подшипников качения. Рабочие зазоры в опорах (до 0,6 мм на диаметр) препятствуют загрязнению последних. Механическая часть опор не требует обслуживания, в результате чего снижаются эксплуатационные расходы.
Copyright © 2005 — 2015, ООО "Станко-Пром"
При перепечатке статей и материалов, ссылка на сайт обязательна.
При перепечатке статей и материалов, ссылка на сайт обязательна.
